DESCRIPTION
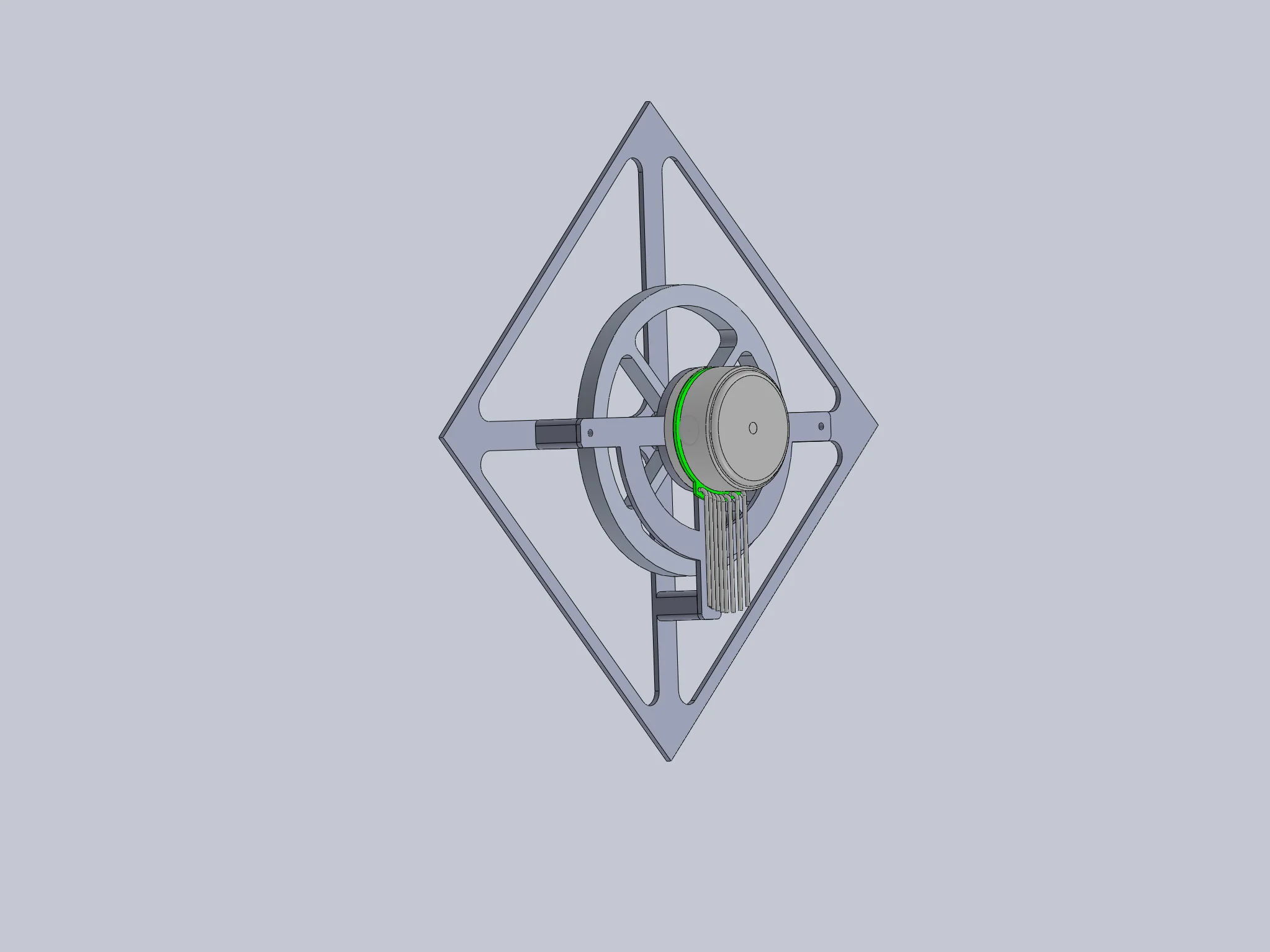
The purpose of this project is to build and program a prototype of a 2-dimensional “Cubli” - a simplification of the 3-dimensional cube which is able to jump up and maintain balance on its corner by converting the angular momentum of spinning gyroscopic reaction wheels to angular momentum of the entire system. The two-dimensional cubli prototype will be able to maintain balance on each of its edges by adjusting in real time the torque output of it’s brushless 24V motor. Our two-dimensional prototype will be expanded into a working 3-dimensional model capable of linear movements akin to “walking”, a mechanical movement which can be utilized for self-assembly and attitude control of satellites. The control law algorithms that we develop can easily be extended into other applications, namely embedded control systems. During development of our prototype each step of the process will be thoroughly documented, and the working prototype will easily be able to be replicated to serve as a teaching tool for Cal Poly’s College of Engineering.