We are the Cal Poly Underwater Remotely Operated Vehicle (UROV/ROV) team. Come talk to our team anytime on Saturdays in building 197 room 102.

2018 Team Picture
Coming from mixed majors and backgrounds, we are building a task-based vehicle for both competition and research in aquatic environments.
TEAM LEADS - JARED & SPENCER
COMPETITION
The international MATE competition is held in a different location each year. In the past, our team has competed in Houston, Texas (2016) and St. John's, NL, Canada (2015). Students from all over the world compete in this international collegiate level competition to learn about submersible technology and gain experience that guides them toward the technical marine workforce.

Our 2016 ROV lookin’ good
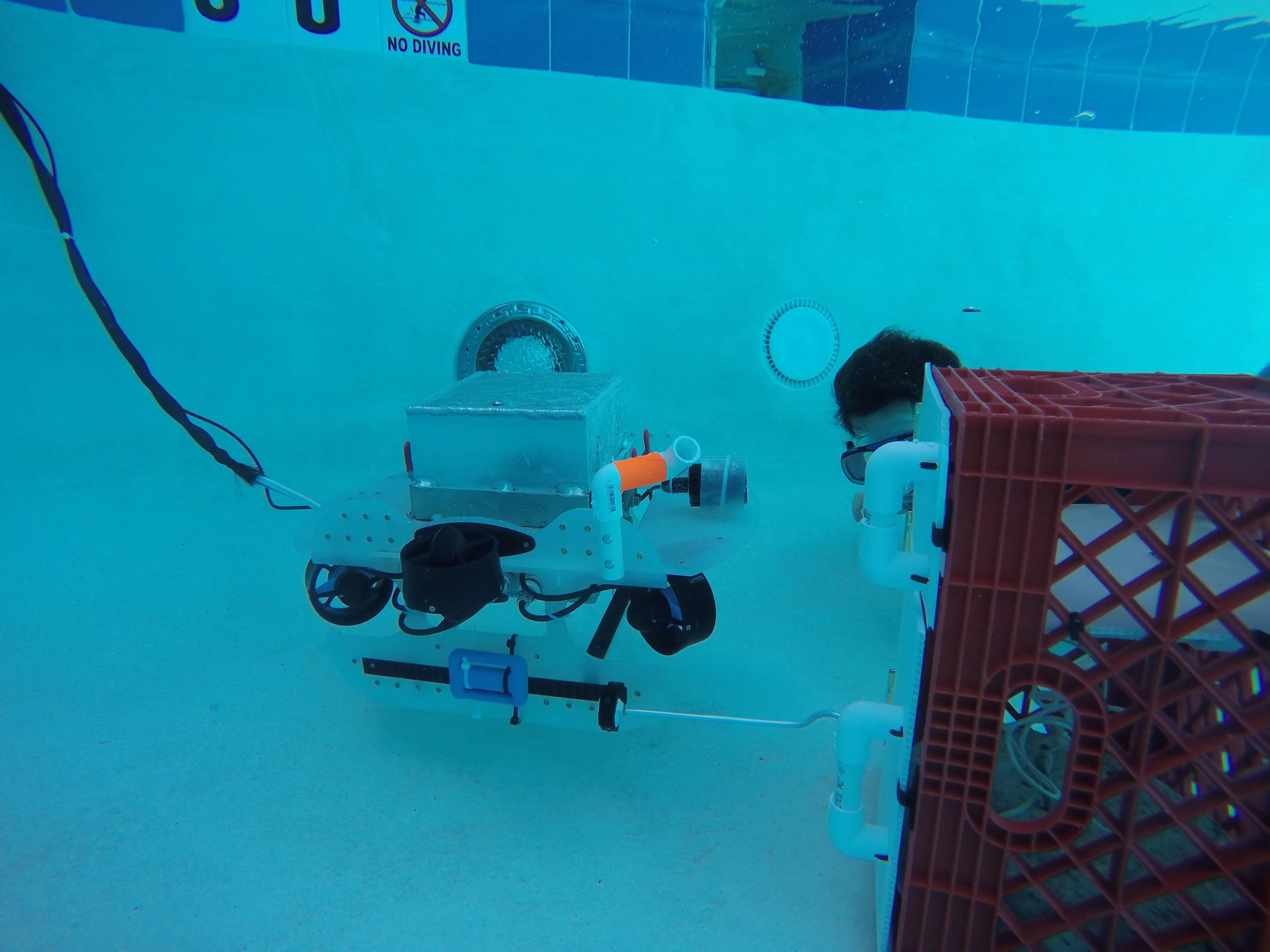
Last summer the competition took place in Kingsport, Tennessee. The focus was freshwater, involving infrastructure maintenance, ecological research, and marine archaeology.
In the summer of 2018 it took place in King County, Washington from June 21st through the 23rd. This iteration of the competition challenged us and our robot in the fields of maritime archaeology, seismology and renewable energy. More information about the competition can be found at the Marine Advanced Technology Education website.
Our 2015 ROV performing its qualifier for competition.

5/16/23
”The UROV team is currently in the process of finalizing the design of their underwater remotely operated vehicle. They have made progress on the vehicle's grabber mechanism and have decided to pursue either an ethernet or a USB cable for the vision system. Next steps for the team include selecting the vision system and integrating it with the UROV's control system, as well as performing extensive testing and calibration to ensure that everything is working properly.”
